realsense d435i의 카메라는 Monocular 인가? Stereo 인가?
이 부분을 잘못 알아서 한참 헤맸다. 틀림없이 Stereo인줄 알았는데 오른쪽에 렌즈 하나만 달린 Monocular 였던 것이다. 아…. 현타 엄청나게 왔다
Monocular 카메라의 캘리브레이션 방법은 다음 사이트에 나와 있다.
ROS wiki: How to Calibrate a Monocular Camera
Intel이 제공하는 Calibration SDK 사용
intel에서 제공하는 calibration tool을 사용한 캘리브레이션 시도해 보았다. 하지만 내부 파라미터를 빼오기 힘들어 지양하는 방법이란 말을 듣고 바로 포기했다.
사실 issue로서 failed to start calibration 이 떴다. 왜인지는 모르겠다.
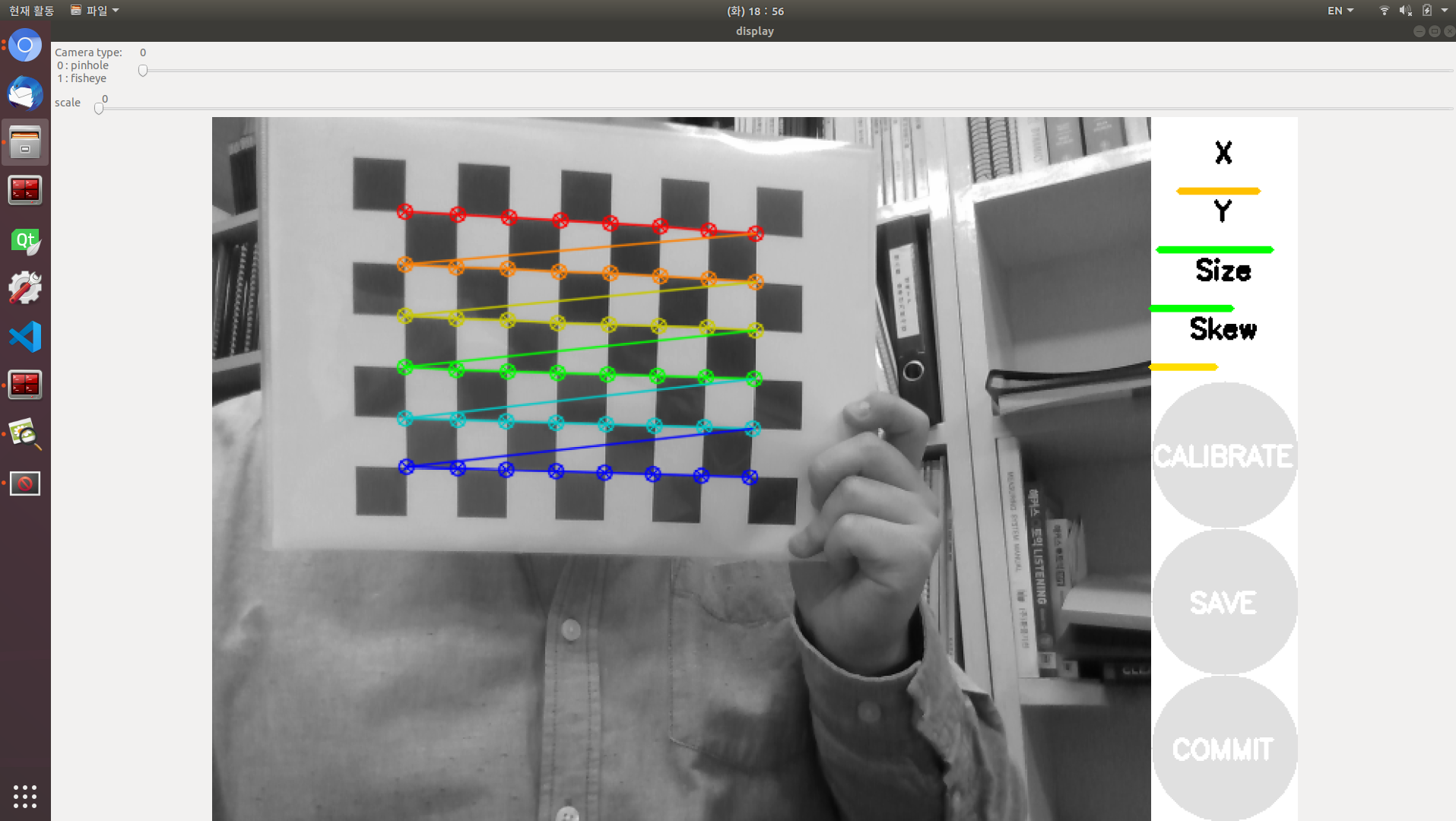
Monocular Camera Calibration
-issue: Waiting for service /camera/set_camera_info …
Service not found
rosrun 명령어 끝에 –no-service-check를 붙임. 서비스 없이 가능할까?
-issue: (display:11948): GLib-GObject-CRITICAL **: 17:07:10.740: g_object_unref: assertion ‘G_IS_OBJECT (object)’ failed
무슨 이슈인지 짐작도 안간다.. gstreamer와 관계있다고 추정? 이 에러는 다양한 이유가 있기 때문에 직접적 해결은 못했다….
하지만 결국 해결헀다!! 토픽과 rosrun의 경로가 안맞았기 때문이다.
/camera/camera_info
/camera/image_raw
위의 두 Topic이 실행되고 있었어야 하는데, 실행은 되고 있지만 경로가 맞지 않아 Calibration node가 실행을 못하고 있었던 것이다.
실제 실행되고 있었던 Topic은 /camera/color/camera_info, /camera/color/image_raw 였기에,
결국 rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.108 image:=/camera/image_raw camera:=/camera을
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.108 image:=/camera/color/image_raw camera:=/camera 으로 고치고 나서야 실행되었다.
공부부족이었다! rosrun문법에 대해서 더 공부하자. pub, sub/srv, client/param 역시 한번 복습 필요
Calibration 결과
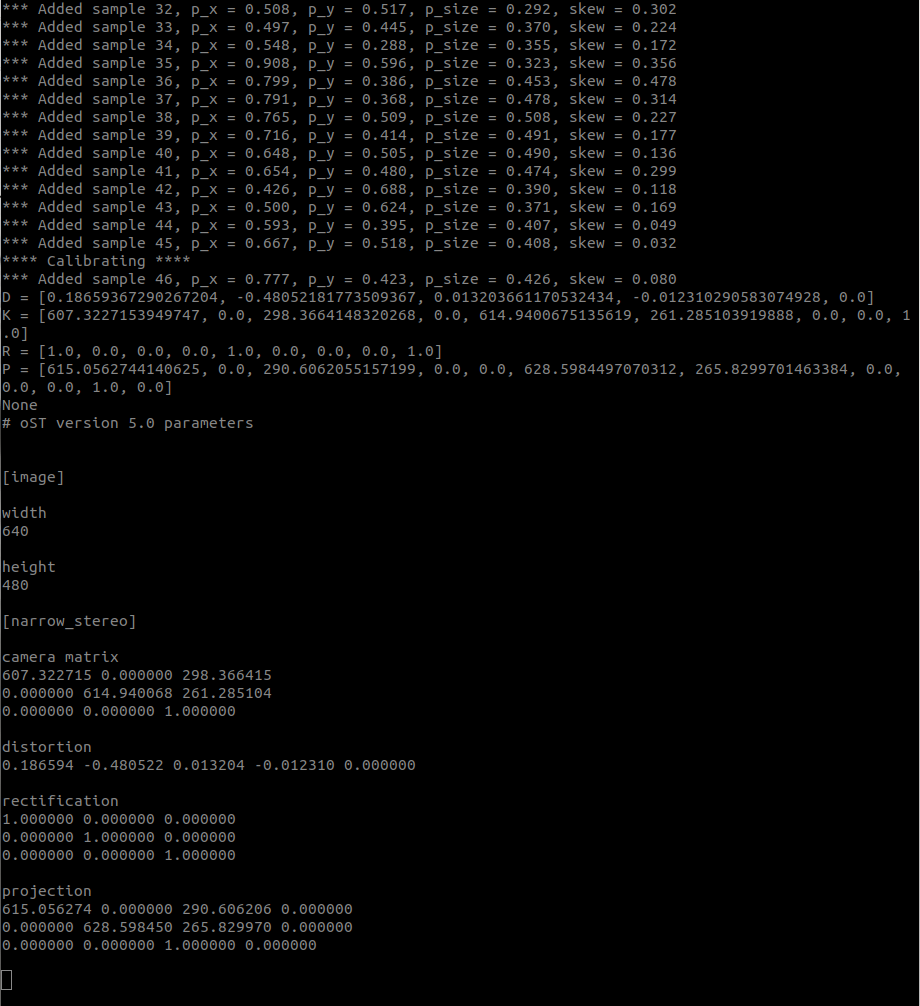 터미널 창에 출력된 결과를 보면 camera matrix에 내부 파라미터의 값이 나온 것을 볼 수 있다. 그 외에 distortion(왜곡)이나 rectification(정류? 뭔지 모르겠다), projection(사영) 성분 역시 검출할 수 있다.
터미널 창에 출력된 결과를 보면 camera matrix에 내부 파라미터의 값이 나온 것을 볼 수 있다. 그 외에 distortion(왜곡)이나 rectification(정류? 뭔지 모르겠다), projection(사영) 성분 역시 검출할 수 있다.
Refstop
Deep Learning 및 SLAM을 공부하고 있습니다.

Comments